These days, one of the most important criteria for the clients next to the price is the product delivery time. These factors along with the increasing number of orders as a result of growing consumption culture have contributed to the intensive development of automation in logistics centers. Simple, manual sorting has been replaced by systems capable of automatic processing and sorting resulting in significantly increased volume of products and parcels.
The system described in this article is in nature semi-automatic and its purpose is to support operators responsible for taking the packages off the sorting line. In case of manual sorting, the most common method of verification is scanning using handheld scanners, available near the sorting line, or on the operator’s wrists. This solution, however, comes with a need to conduct additional training of the operators and with a risk that mistakes can be made by the operators, which arises from the limitations of humans.
In order to limit the amount of errors and increase the speed of the whole process, handheld scanners can be replaced with a system, which We have developed as an R&D project. The system consists of both hardware and software.
The labels are displayed on an LED screen comprised of smaller modules connected in series. This type of construction allows for easy expansion and flexibility to the needs of the sorting line. A dedicated driver connected to a PC is used to control the LED screens. The PC reads the signals from the sensors and the encoder and then – using the appropriate algorithms – generates and tracks the labels containing information about the parcels.
The system is comprised of the following components:
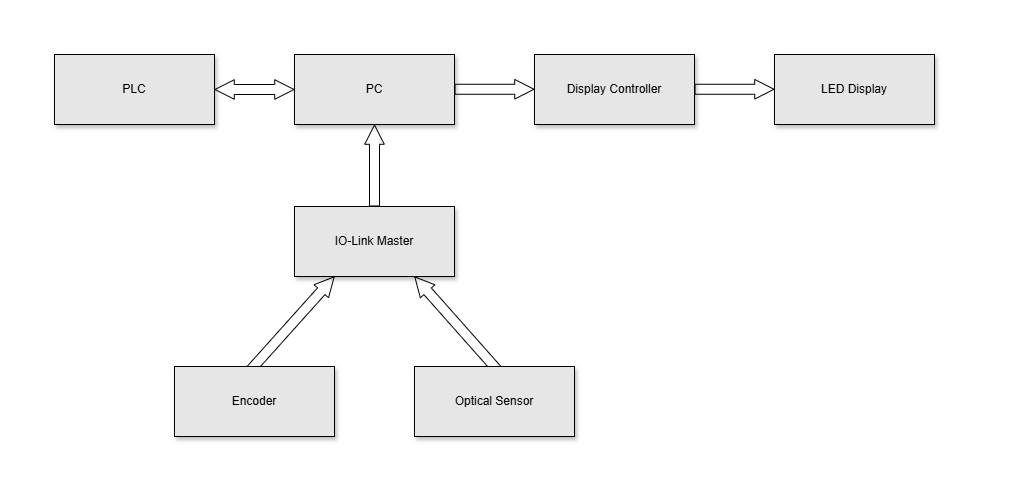
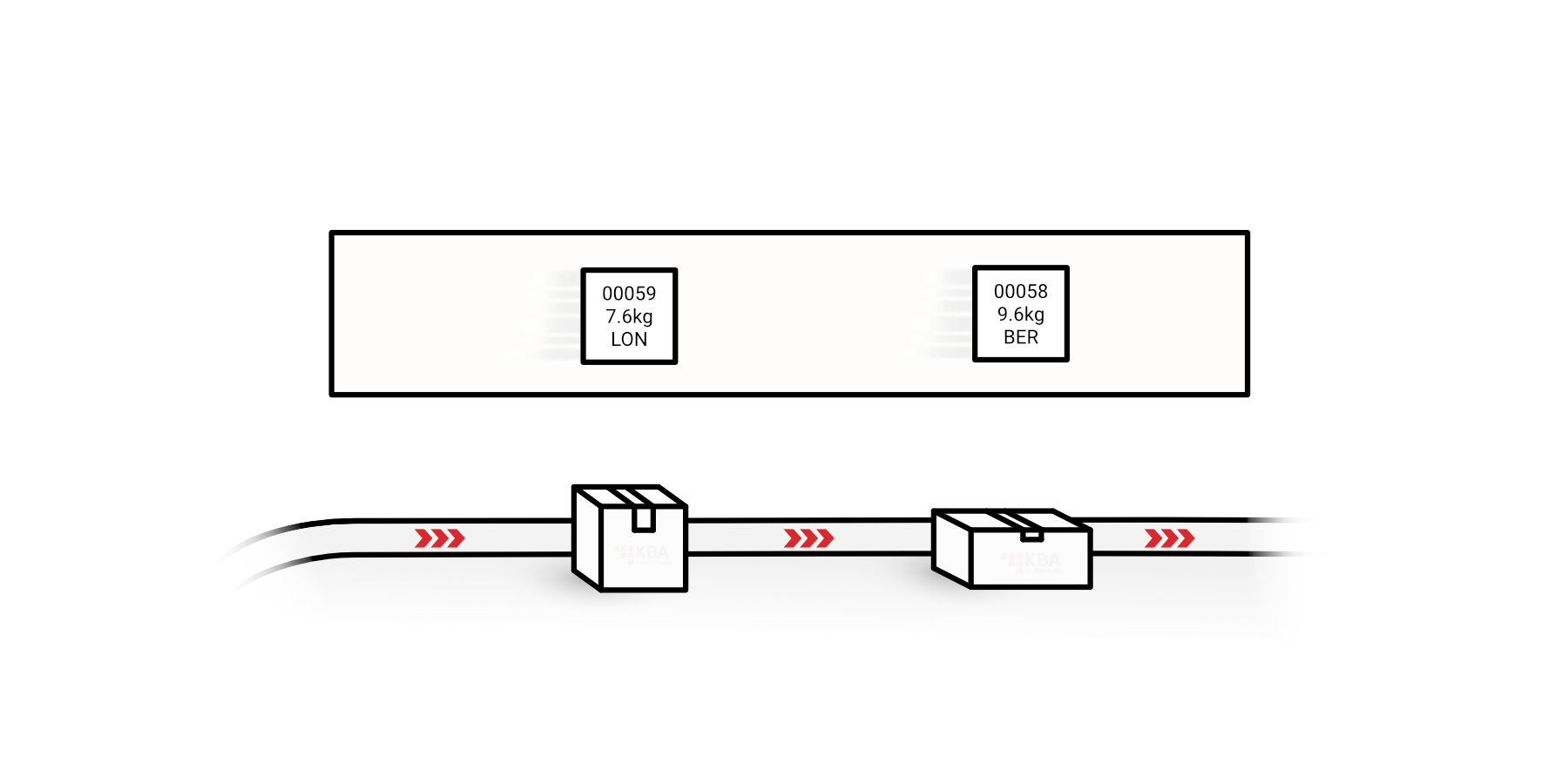
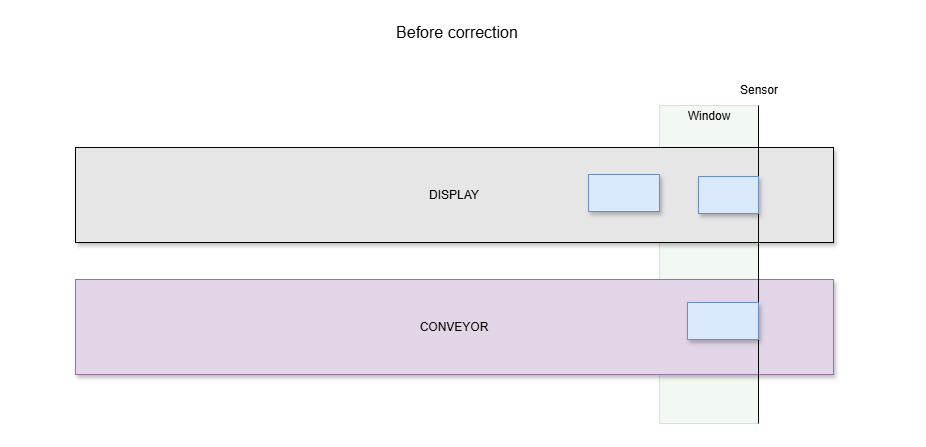
There is a sensor installed at the beginning of the system, which is used to generate labels with correct length and position. The speed of the conveyor is read using an encoder mounted beneath the conveyor belt.
Labels, which are projections of real packages have the following information:
These inforamtions are deplayed above the label, allowing smaller distances between packages, while keeping a bigger font and therefore making it more visible.
Every lables along with its information is displayed in a different colour, which significantly improves distinguishing data.


Our app is used to communicate with the PLC in order to get and assign data of a real package to its virtual equivalent displayed on the screen. Additionally, the app contains algorithms to create, move and delete labels assigned to packages.
The scripts were made using the Python programming language and an integrated programming environment PyCharm. For better library control used in the app, a virtual environment has been created, to which the following libraries have been assigned:
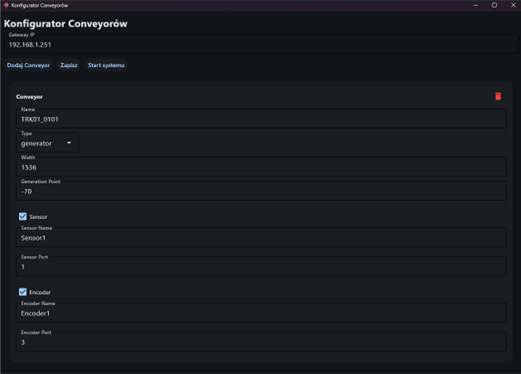
To simplify configuration of the system, a configuration GUI has been created for the users. It’s capable of setting a name, type and length of the conveyor belt. Additionally, it’s possible to configure sensor and encoder names and their connection to the I/O link island.
Label generation happens using an algorithm, which reads values from the sensor and the encoder connected to the I/O link island. As a result, the generated label will always be the size of the real package, which significantly helps the operators. Additionally, the algorithm matches data received from the PLC to appropriate packages.
To achieve correct synchronization of the label to the real package, an algorithm to move the label has been used. It uses the belt speed read from the encoder and then calculates the displacement of the belt in a time of a single cycle.
In case that a label is moved in relation to the package on the conveyor, the algorithm will eliminate this difference using a sensor installed at the end of the current or the beginning of the next conveyor. The algorithm checks if in a given range, for example 40 centimeters, a label, which requires lining up to the actual package is present. In case the package is not found, it’s considered to have been taken off by the operator and will be deleted off the screen.
This solution allows package synchronization over longer distances and increases screen readability.

Correct operation of the system has been verified by creating the system and coducting tests in static and dynamic conditions.
Static testes aimed at the best possible depiction of the packages in a form of labels on the screen. Special care was taken when it came to depicting their placement on the screen – values set in centemeters were calculated to pixels to acheieve the highest precision of positioning.

Dynamic tests were conducted at different speeds of the conveyors ranging from 0,5 m/s to 2,5 m/s. This allowed to verify if the package generation, movement and updating algorithms function correctly both at a lower and a very high speed of the system and to verify its stability in conditions of increased dynamic load.
The system stands out with the following pros:
Technical limitations:
The system offers a good solution in the scope of semi-automatic sorting. It’s characterized by its simplicity and easy to understand working principles, which translates to ease of use, maintenance and expansion. A great advantage of the system is its flexibility – a possibility to adapt the system’s range and datatype quickly and easily depending on the current needs of the user. This allows for adapting the solution to different use cases and operation requirements.

Project: “Development of an intelligent transport system for the logistics industry” No.: FENG.01.01-IP.02-0420/23-00. This project is co-financed through the Smart Path measure, implemented by enterprises under the “Support for Entrepreneurs” priority of the European Funds for a Modern Economy Program.

